
M2BAX180MLB4 B3 22KW(3GBA182420-ADCCN)
M2BAX250SMA4 B3 55KW +VC376
M2BAX180MLA4 B3 18.5KW +VC376
M2BAX80MB4 B5 0.75KW
M2BAX132SB2 B3 7.5KW
M2BAX280SMB4 V1 Stator with PTC with refueling port
M2BAX90LA4 B5 1.5KW
M2BAX132SA4 B5 5.5KW+VC209+VC376
M2BAX80MA6 B5 0.37KW+VC209+VC376
M2BAX250SMA4 B3 55KW
M2BAX280SA4 B3 75KW +VC376
M2BAX100LB4 B35 3KW+VC009
M2BAX225SMA4 B35 37KW+VC009
M2BAX132SB2 B5 7.5KW+VC209+VC002
M2BAX112MA4 B5 4KW+VC209+VC002
M2BAX160MLA4 B35 11KW+VC009
M2BAX180MLB4 B3 22KW+VC002
M2BAX315MLA4 B3 200KW+VC180
M2BAX100LA6 B5 1.5KW(3GBA103510-BSCCN)
M2BAX160MLA4 B3 11KW
M2BAX225SMA4 B3 37KW+VC002

M2BAX112MA6 B3 2.2KW
M2BAX71MA4 B34 0.25KW+VC008+VC540
M2BAX160MLB4 B3 15KW+VC002
M2BAX160MLB2 B3 15KW+VC002
M2BAX315SMA6 B3 75KW+VC002
M2BAX132MA4 B3 7.5KW+VC002
M2BAX180MLA2 B3 22KW+VC002
M2BAX315SMA4 B3 110KW+VC002
M2BAX315SMC4 B3 160KW+VC002
M2BAX160MLA4 B3 11KW+VC002
M2BAX200MLA6 B3 18.5KW+VC002
M2BAX180MLA4 B3 18.5KW+VC002
M2BAX160MLC2 B3 18.5KW+VC002
M2BAX132MA6 B3 4KW+VC002
M2BAX71MA2 B3 0.37KW
M2BAX71MA2 B5 0.37KW
M2BAX71MB2 B3 0.55KW
M2BAX180MLA6 B5 15KW
M2BAX225SMA4 B3 37KW
M2BAX112MA4 B3 4KW
M2BAX180MLA4 B3 18.5KW
M2BAX200MLA4 B5 30KW
M2BAX180MLB4 B5 22KW
M2BAX315MLA4 B3 200KW
M2BAX280SA4 B3 75KW
M2BAX132MA4 B5 7.5KW
M2BAX160MLB4 B5 15KW
M2BAX180MLA4 B5 18.5KW
M2BAX100LA4 B3 2.2KW
M2BAX100LB4 B3 3KW
M2BAX100LB4 B5 3KW
M2BAX112MA4 B5 4KW
M2BAX132SA4 B3 5.5KW
M2BAX80MB4 B3 0.75KW
M2BAX90LA4 B3 1.5KW
M2BAX90LA4 B5 1.5KW
M2BAX100LA4 B5 2.2KW
M2BAX160MLA4 B5 11KW
M2BAX160MLB4 B3 15KW
M2BAX100LA4 B5 2.2KW
M2BAX71MA4 B3 0.25KW
M2BAX90SA4 B3 1.1KW
M2BAX132MA4 B3 7.5KW
M2BAX225SMB4 B35 45KW
M2BAX225SMB4 B5 45KW
M2BAX225SMB4 B3 45KW
M2BAX132MA4 B35 7.5KW(3GBA132310-ADCCN)+VC009
M2BAX90SA4 B5 1.1KW
M2BAX80MA4 B3 0.55KW
M2BAX71MA4 B5 0.25KW
M2BAX132SA4 B5 5.5KW
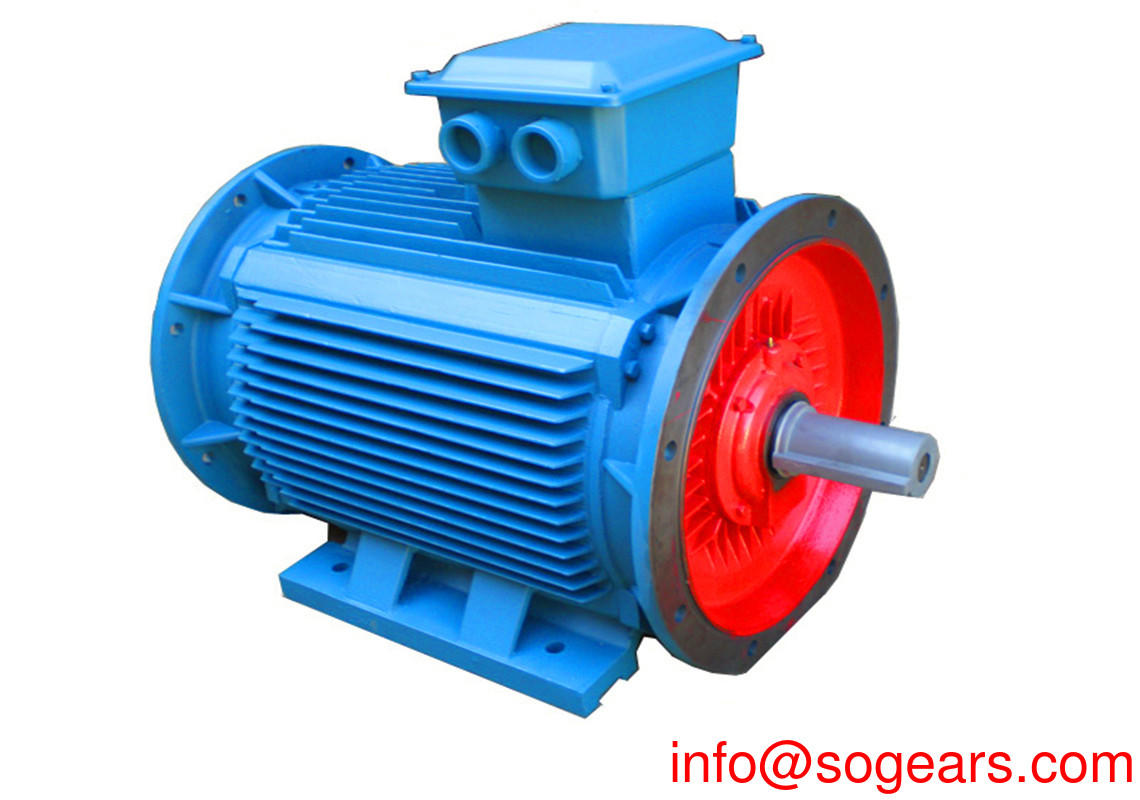
Rated outputThe rated power of the MABAX series motors refers to the motor operating under the s1-continuous operation system (IEC 60034-1), when the ambient temperature is -20 ° c ~ 40 ° c and the altitude does not exceed 1000m.Voltage, frequency
M2BAX series motors are imported bearing NSK, SKF brand bearings, all motors in the d-end standard axial locking bearings. Product design protection level IP55, and provide IP56, IP65 customization. Provide up to dozens of motor variable code selection configuration, fully meet the use of a variety of applications.ABB motors' common motors are called M2BAX series general process motors, which are equivalent to ordinary motors in China. In terms of energy consumption, they are IE2 -- equivalent to grade 3 of the energy consumption standard of the 2012 edition in China, and equivalent to YX3 and YE2 series motors in China.
IEC 60034-1 defines the effects of temperature rise on voltage and frequency. The standard divides the combined changes in voltage and frequency into A and B zones. Area A is voltage deviation +/-5% and frequency deviation +/-2%; Area B is for voltage deviation +/-10% and frequency deviation +3%/-5%.
Both motors can provide rated torque in zones A and B, but the temperature rise will be higher than the rated voltage and frequency. The motor is only allowed to run for short periods in zone B.
Low voltage motor refers to the motor with rated voltage below 1000V.
The so-called low voltage is to refer to the ac voltage below 1000V, and here we say the general voltage of the motor is ac 380V, or is 440V or 660V and several classes of asynchronous motor.
Asynchronous motor is relative to the synchronous motor, synchronous motor speed calculation formula of n = 60 f/p for power frequency f, p for the motor of logarithm, but this is the theory of rotational speed, general motors will be kind to eliminate external force, make the actual motor speed is lower than the above formula of motor speed, known as the motor. That is to say there is a difference between them, out of sync!
Protection and control TDHD provides protection, control, measurement and analysis solutions for low voltage motors.
Short circuit protection
TDHD provides over-current protection for motors caused by interphase short circuit. The protection consists of independent overcurrent elements, each of which can be started separately, and the action time can be set according to the specific situation on site.
Locked-rotor protection
In the motor running process by overheating elements to provide protection, in the motor starting process by automatic recognition of current changes to provide protection, this can be a long time to start the motor and do not allow the process of blocking rotation time to provide fast protection. If the current drop is not obvious during the starting process of the motor, the blocking protection will be started, and the blocking protection can also be recognized by the over-load protection and provide protection.
Overload protection
When the heat capacity reaches 100%, the overload protection trips. The thermal capacity takes the comprehensive thermal effect of positive and negative sequence currents into full consideration, and the detection of true effective current ensures the correct response to the harmonic thermal effect. The protection element provides overload protection with fixed time limit and inverse time limit to meet the needs of different sites.
Phase current unbalance protection
TDHD monitors the ratio of phase current imbalance of the motor. If the phase current imbalance is greater than the alarm value and lasts for more than 5 seconds, an alarm will be issued. Tripping occurs if the phase current imbalance is greater than the tripping value and persists for more than 5 seconds.
Under voltage protection
For voltage-sensitive loads (such as induction motors), the drop in voltage will increase the suction current, which may cause very dangerous overheating in the motor. When the voltage drops to the preset voltage setting value, after a preset time delay, the undervoltage protection will issue an alarm or trip command.
Over voltage protection
For motors running under constant load, overvoltage can cause current to drop. However, the increase of iron loss and copper consumption will cause the motor to heat up. In this case the current overload relay will not operate and will not provide adequate protection, so this overload element will provide protection to the motor in the case of continuous overvoltage.

Earth/leakage protection
The ground fault value is measured as a percentage of the primary CT value. Ground current detection based on zero-sequence CT scheme. To prevent the false alarm caused by instantaneous inrush current, a time delay can be set in this function. The protection function provides ground fault alarm or fault trip, which can provide an early warning of insulation damage.
Protection for too long startup time
The device automatically identifies the starting process of the motor. If the motor does not complete the starting within the specified starting time, the protection action will be taken.
Undervoltage restarts automatically
When this function is enabled, after the motor loses power in an instant, it starts timing from starting. If after the low-voltage protection action, the voltage is restored to more than 90% of the rated voltage before the set self-starting time, then the generator closes the command.
Start control function
TDHD can be applied to the following startup modes
■ direct start
■ two-way starting
■ star delta starts
■ start the autotransformer
■ power swing start function
■ series resistance starts
Switching input
■ the motor protection device provides an 8-way switching quantity input and can be expanded to a maximum of 11-way switching quantity input
■ optical input, passive dry node input
■ for starting contactor, stop/reset, local/remote, process linkage and general switch status display
■ the liquid crystal panel with a switch indicator
Relay output
■ maximum expansion for 5 relay outputs
■ contact capacity: AC250V/5A DC30V/5A
■ for trip, alarm, start and remote output
■ LCD panel with relay opening/closing indication
Development history editor
After the founding of the People's Republic of China, China's relay protection technology team from scratch, in about 10 years in about half a century through the road of advanced countries.
Low voltage motor protector
Low-voltage motor protector (1 piece)
In 1958, Chinese technicians creatively absorbed, digested and mastered the performance and operation technology of foreign advanced relay protection equipment, and established the first professional relay manufacturer -- acheng relay factory, which marked the birth of China's national relay industry.
In the 1960s, China has built a complete system of relay protection research, design, manufacture, operation and teaching. Basically for electromagnetic, rectifying type.
From the mid-1960s to the mid-1980s, transistor relay protection flourished and was adopted.
The late '80s and early' 90s. Integrated circuit protection has formed a complete series, gradually replacing transistor protection.
From the 1990s, China's relay protection technology has entered the era of microcomputer protection. In 1984, the microcomputer protection device for transmission line developed by north China electric power institute was firstly appraised. Generator protection and generator transformer group protection also passed the appraisal successively in 1989 and 1994.
By the end of 2006, the microcomputer rate of relay protection device of 220kV and above system was 91.41%.
At present, the development of domestic relay protection has reached or even exceeded the level of the same industry in foreign countries in both hardware and software technology and protection principle.
In 2006, the correct action rate of ac system relay protection device of state grid company was 99.97%.
Compared with the line microcomputer protection, the main equipment (bus, transformer, etc.) protection, although started late, after many years of research has made gratifying progress. The main reasons for the unstable action of component protection:
Element protection principle and complex wiring. Since each side of the transformer is not a simple electrical relationship, there is a magnetic coupling relationship, so how to distinguish the transformer magnetizing inrush current and fault current is the transformer protection has not been very good in principle to solve the problem; There are many related equipment of bus protection, the wiring is complex, it is not easy to repair, and the technology of bus protection against current transformer saturation is not very mature.
(2) the microcomputer component protection of the start and promotion of late, relay protection professionals and operating personnel because of the microcomputer component protection familiar with and master degree is not enough, little experience in the operation of the maintenance and operation of many problems.
(3) less transformer, bus fault times, the number of component protection action is relatively small, statistical samples are small, the correct action rate of component protection statistics has a certain degree of contingency and randomness.
China's dc protection, up to now, ten years of operation. On the whole, the curve of correct action rate fluctuates greatly. The main reasons are: dc protection technology is introduced late, the number of engineering applications is small, dc protection technology, operation and maintenance level is not mature; The frequency of dc protection action is less, the statistical sample is less, the data statistics exists certain contingency.
Short circuit protection
■ blocking protection
■ fixed time limit overload protection
■ reverse time overload protection
■ phase current unbalanced protection
■ phase break protection
■ under voltage protection
■ overvoltage protection
■ ground/leakage protection
Low voltage motor
Low-voltage motor (1)
■ protection for too long startup time
■ swing the power to start
■ process linkage
■tE time protection
Monitoring and measurement
■ motor operating parameters and historical data
■ running process data
■ display full power electrical parameters
■ switch quantity input state and relay output state
■ event record information
■ maintenance records
communication
■ rs485/232 communication interface
■ modbus-rtu communication protocol
Low voltage motor refers to the ac voltage of the motor below 1000V, generally refers to the ac 380V motor, 440V or 660V and other classes of asynchronous motor actual use are relatively little. Low voltage motors are divided into ac asynchronous motors and dc motors. Asynchronous motors are relative to synchronous motors. The formula for calculating synchronous speed of synchronous motors is n0=60f/p. F is the power frequency and p is the polar logarithm of the motor. Advantages: 1. Simple structure, reliable operation, wide application; 2. Convenient manufacturing and maintenance; 3. Good working characteristics; 4. Low cost. Disadvantages: 1. Limited by the operating current, the capacity cannot be too large; 2. Motor protection is generally relatively simple, easy to damage; 3. Large capacity low-voltage motor has great influence on the system when it is started.
High voltage motor refers to the motor with rated voltage above 10000v. 6000V and 10000v are commonly used. Due to different power grids abroad, there are 3300v and 6600v voltage levels. High voltage motors can be used to drive various machines. Here is the difference between high-voltage motor and low-voltage motor. High voltage motor and low voltage motor have their own advantages and disadvantages. What are their advantages and disadvantages
Compared with low-voltage motor, high-voltage motor has the following advantages:
1. The library can increase the power of the motor, which can reach thousands, even tens of thousands of kilowatts. This is because, at the same power output, the current of high-voltage motor is much smaller than that of low-voltage motor. For example, the rated current of 500kW, 4-stage three-phase AC motor is about 900A when the rated voltage is 380V, and only about 30A when the rated voltage is 10kV. So the winding of high voltage motor can use smaller wire diameter. Therefore, the stator copper loss of high-voltage motor is smaller than that of low-voltage motor. For high-power motors, when using low-voltage power, a larger area of stator slot is needed due to the need of thicker conductor, which makes the diameter of stator core larger and the volume of the whole motor larger
2. For large capacity motors, the power supply and distribution equipment used by high-voltage motors are less than the overall investment of low-voltage motors, and the line loss is small, which can save a certain amount of power consumption. In particular, 10kv High-voltage Motors can directly use the power grid, so that the investment in power equipment will become less, the use will become simple, and the failure rate will become smaller.









































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}